移動ロボット研究開発向け3次元TOFセンサ販売開始
移動ロボット研究開発向け3次元TOFセンサ販売開始
-水平100°垂直85°、移動ロボットの外界センシングに—

3次元TOFセンサ
株式会社ZMP(東京都文京区、代表取締役社長:谷口恒、以下ZMP)は、この度、移動ロボット研究開発向けの3次元TOFセンサの販売を開始いたしました。
本センサは、PMDテクノロジ製で、水平100°、垂直85°の視野角で6mまでの距離の計測が可能な3次元TOFセンサです。照明を当ててカメラで撮影することにより、対象物の形状や奥行きを計測することができ、暗い環境でも計測が可能です。インタフェースはUSB3.0でC/C++およびMatlabのSDKが付属、移動ロボットに搭載しアプリケーションを開発することで、外界センサとして活用が可能です。
ZMPでは、移動ロボットの開発プラットフォームとして、実車1/10サイズロボットカーRoboCar 1/10、台車型移動ロボットPOWER WHEEL IIを販売しています。本TOFセンサを、これらの移動ロボットにおける外界センサとして搭載し、実験用ロボットプラットフォームとしてご活用いただけます。
3次元TOFセンサは、本日より受注を開始致します。
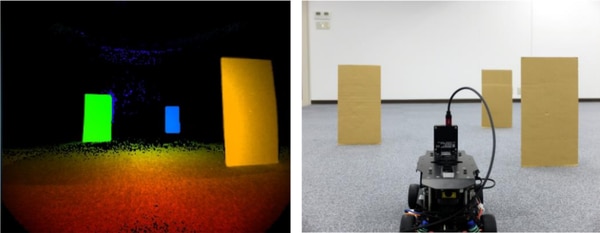
左:3次元TOFセンサ計測例(色で距離を示す)/右:ロボット後方から撮影
【実車1/10スケール RoboCar 1/10】
http://www.zmp.co.jp/products/robocar-110
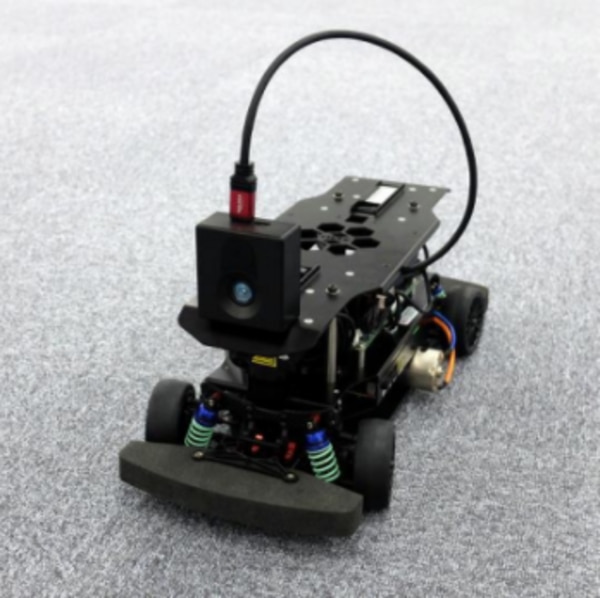
3次元TOFセンサ搭載例
(RoboCar 1/10)
【研究開発用移動台車プラットフォーム POWER WHEEL II】
http://www.zmp.co.jp/products/power-wheel

POWER WHEEL II
【主な仕様】
寸法 62mmx66mmx29mm
TOFセンサ IRS1125C Infinion 3D Image Sensor IC
計測距離 0.5 – 6m
フレームレート 5, 10, 25, 35, 45, 60 fps
照明 4xVCSEL, 850nm
ソフトウェア C/C++ SDK、Matlab-SDK
解像度 352×287 px
視野角 水平100°、垂直85°
インタフェース USB 3.0
距離解像度 <= 1 % of distance (1 – 6 m @ 5fps)
<= 1 % of distance (0.5 – 2 m @ 60 fps)
OS Windows 7/8, Ubuntu 14.04
power wheel icon
POWER WHEEL II
【価格】
センサ単体、また、ロボットとの組み合わせでご提案いたします。詳細はお問い合わせ下さい。
プレスリリース記事
プレスリリースPDFはこちらからご確認いただけます。
製品のお問い合わせはこちら
お問い合わせ