

CarriRo AD,AD+を最大限活用する!クラウドサービスROBO-HIについて
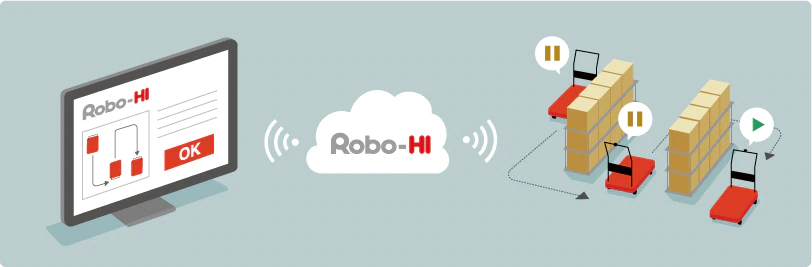
CarriRo®はそれぞれがスタンドアローンで動くことが可能で、通信設備やシステムを必要とせず、シンプルかつリーズナブルにお使い頂けるというのが大きな特徴となっておりますが、一方でクラウドサービスROBO-HIと連携させることで、相互に強調した制御が可能となり、より高度な運用の実現、さらなる省人化の効果をあげることが可能です。
今回、下記連携が可能なROBO-HIを1か月間お試しでお使いいただける無償トライアルを実施いたします。
今回、下記連携が可能なROBO-HIを1か月間お試しでお使いいただける無償トライアルを実施いたします。
【ROBO-HI連携機能紹介】
価格
【通常価格】(1~4の連携機能が利用可)
※10台ご使用の場合
・保守契約加入済みのお客様:月額150,000円(税抜)
・保守契約未加入のお客様: 月額200,000円(税抜)
→今なら!上記が1か月分無料にてトライアル可能です!
(ROBO-HIの活用に必要なWi-Fi等のネットワーク環境はお客様にてご準備いただく必要がございます。)
※10台ご使用の場合
・保守契約加入済みのお客様:月額150,000円(税抜)
・保守契約未加入のお客様: 月額200,000円(税抜)
→今なら!上記が1か月分無料にてトライアル可能です!
(ROBO-HIの活用に必要なWi-Fi等のネットワーク環境はお客様にてご準備いただく必要がございます。)
ROBO-HIを活用した連携機能紹介
ROBO-HIを活用することで以下の機能をお使いいただけます。
1.運用状態の可視化(リアルタイム稼働管理と生産性レポート)
リアルタイム稼働管理と生産性レポートの二つからなっております。リアルタイム稼働管理では、リアルタイムで各CarriRoの位置情報、走行ステータス、バッテリ残量などが把握できるようになっており、CarriRoが人から離れた場所にいたとしても、直ぐに状況が把握でき、対策がとれるようになります。また生産性レポートでは、稼働時間、走行距離、などの情報を日次、週次、月次などの区分でデータとして集計することができ、各CarriRoの稼働率の把握から費用対効果の計算まで管理することが可能となります。
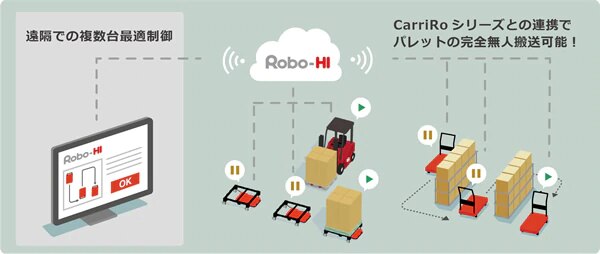
2.複数台同時制御
倉庫や工場の中でCarriRoを同時に複数台使用する場合に、相互に一定のルールに基づいて走行させることや、特定の場所にCarriRoを呼び出すような使い方をすることが可能となります。これにより、円滑な相互の協調動作や、人の動きと合わせたインタラクティブな動作を行うことが出来るようになり、より生産性の向上に貢献します。
3.すれ違い制御機能
十字路などCarriRoの走行が交差するエリアにおいて、複数のCarriRoが同時にそのエリアに入ってきたときに、ROBO-HIが運行状態を整理し、各CarriRoに走行や一時停止の指示を与えることによって、円滑に相互のすれ違いを実現する機能となります。
4.呼び出し制御機能
倉庫内でのピッキング時の台車補充や、工場の生産ラインにおいての部材供給など、台車を必要な場所とタイミングで配車する必要がある場合に、タブレットを用いて呼び出し地点を押すことで、CarriRoを自動で配車する機能となります。ROBO-HIが待機中のCarriRoを判断し、場合によっては予約処理も行い、適時に指定された場所にCarriRoを走行させます。
上記に関するお問い合わせについて
メールでお問い合わせ







© ZMP INC. All Rights Reserved.