
豊田工業大学 スマートビークル研究センター

RoboVision2 車両搭載
豊田工業大学 スマートビークル研究センターでは、高齢者や運転初心者に安全で、さらに環境への負荷が少ない運転支援システムの研究開発を進めています。具体的には、コンピュータがテレビカメラ、レーザスキャナー、GPS (global positioning system) などのセンサから得られる情報をもとに、歩行者や車両、道路、白線などのさまざまな対象を検出し、複雑な走行環境を認識できる技術を開発しています。本研究開発において、RoboVision2は、カメラによる夜間の画像認識技術を開発するためのツールとして活用されております。
本センターでは、近年「走行環境変化にロバストなステレオ技術の検討」として、降雪、雨天、夜間、霧などの走行環境の変化に対して耐性のある認識システムの構築方法について研究を行っております。下記にて検討結果の紹介をしております。
本センターでは、近年「走行環境変化にロバストなステレオ技術の検討」として、降雪、雨天、夜間、霧などの走行環境の変化に対して耐性のある認識システムの構築方法について研究を行っております。下記にて検討結果の紹介をしております。
走行環境変化にロバストなステレオ技術の検討について
1.研究背景
車両における、ステレオビジョンに求められる要求として、
・周辺環境の光の変化
・振動などによるカメラのアライメントのずれ
・リアルタイム処理
・細い支柱やチェーンなどの小さい物体の検出
・奥行情報の取得
など様々な要求が存在し、その要求に対して、三田先生の研究では、様々な取り組み行っており取り組みの一部を下記にて紹介します。
・周辺環境の光の変化
・振動などによるカメラのアライメントのずれ
・リアルタイム処理
・細い支柱やチェーンなどの小さい物体の検出
・奥行情報の取得
など様々な要求が存在し、その要求に対して、三田先生の研究では、様々な取り組み行っており取り組みの一部を下記にて紹介します。
2.オートキャリブレーション機能
使用中のカメラのハード要因のずれなどの変化に対して、研究の中では複数の画像から画像の歪みを補正するパラメータを算出し、自動的にキャリブレーションを行うアルゴリズムを開発しております。下記に、オートキャリブレーション前後を比較した距離計測結果を示します。
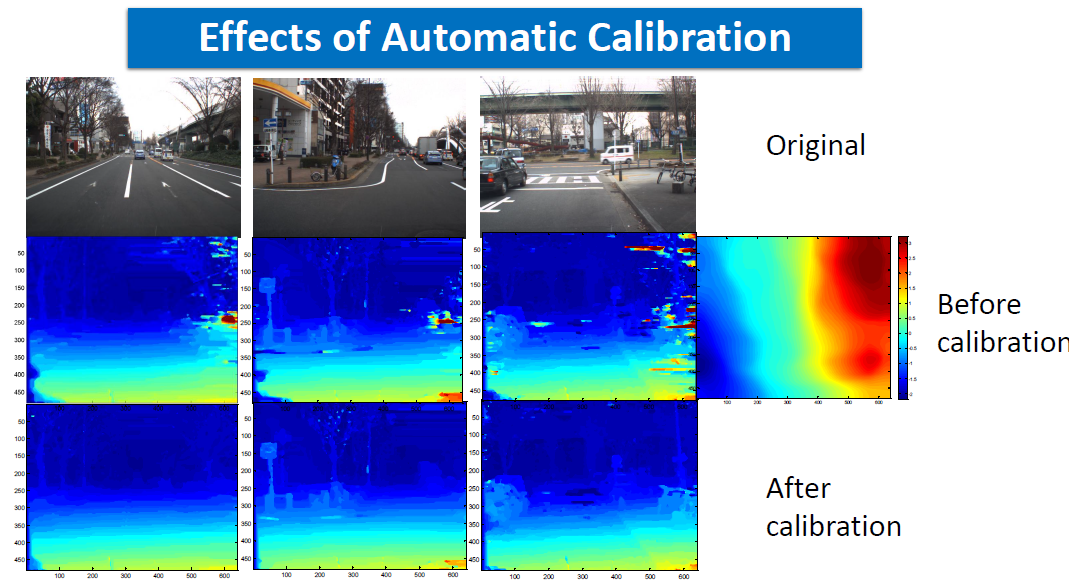
オートキャリブレーションのパラメータを反映することにより、より広範囲のエリアでの測距結果を得ることが可能になっております。
3.夜間の視認性向上の取り組み
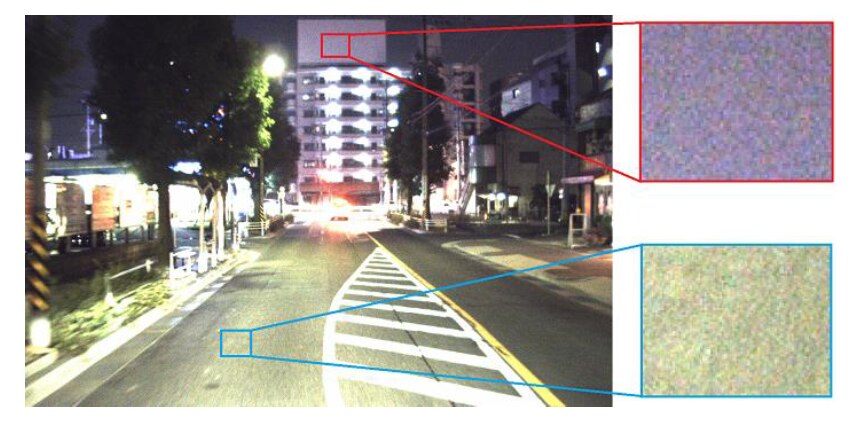
夜間の画像ではイメージのノイズが増加。計算アルゴリズムは割愛いたしますが、マッチングする点の周辺情報参照し画像のノイズを取り除いた後に視差を計算することによりノイズの少ない視差画像の取得に成功しています。また、高感度CMOSセンサー搭載のRoboVision2を用いることで夜間でも高輝度な画像の計測が可能となっております。
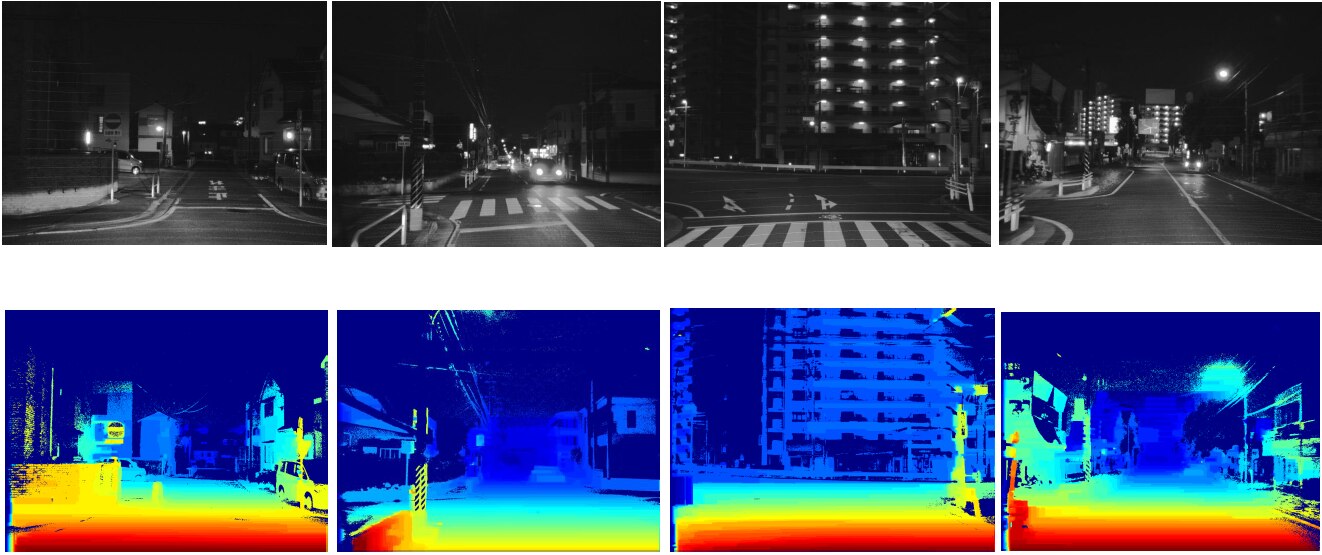
夜間における距離計測結果
4.トンネル内でのステレオビジョンシステム
車載カメラとしての使用においてはトンネル内で画像はブレが大きく精度の良い奥行き情報の算出が困難なことがあります。特に、スピードが高い場合や測定対象との距離が近い場合にその傾向が顕著になる傾向があります。

トンネル内の計測イメージ例
本研究ではトンネル内での画像のブレを解消するため、車両の速度とカメラのシャッタスピードの考慮することでトンネル内で生じるブレを軽減する手法を開発しています。
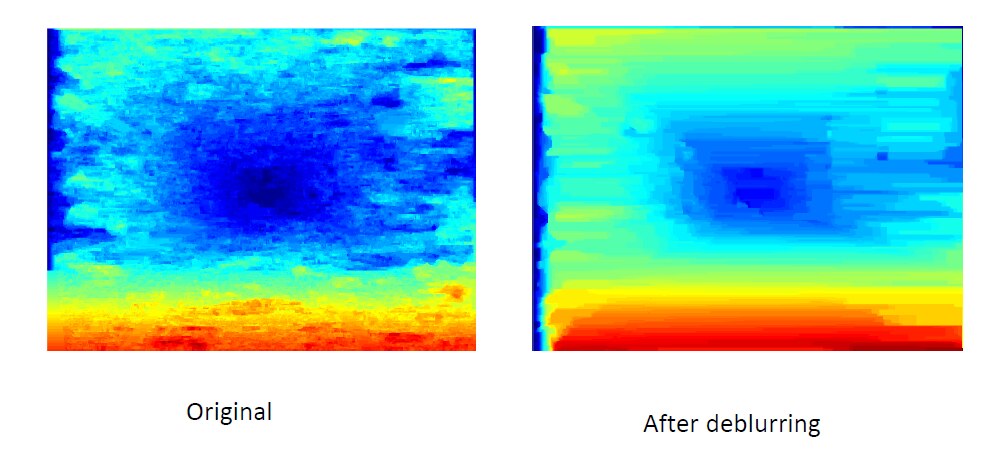
トンネル内の距離画像計測結果比較
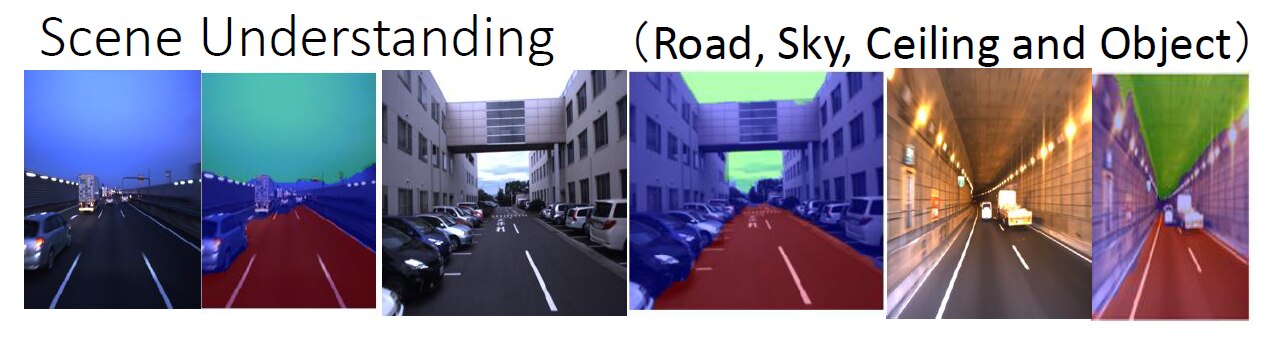
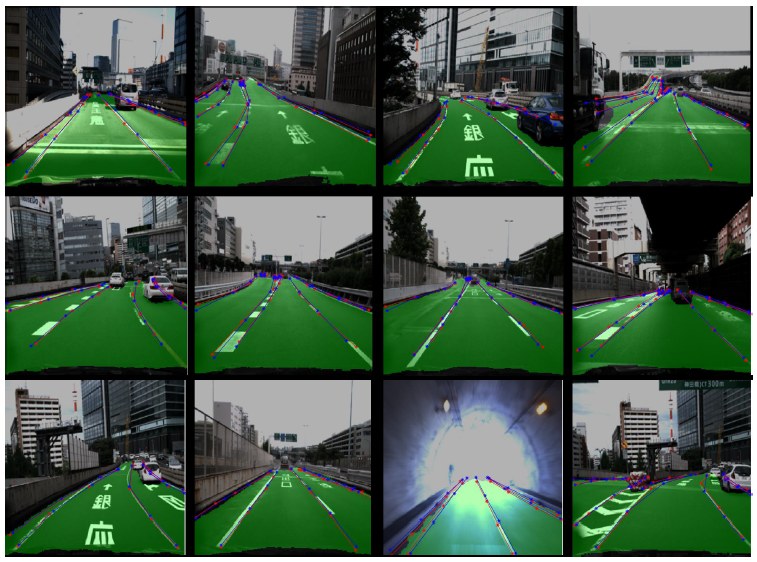
5.ディープラーニングを活用した奥行き情報の算出
その他の取り組みとして、ディープラーニングを活用した画像認識技術について説明があり、セマンティックセグメンテーションやレーンディテクション、これらを組み合わせた画像認識結果を紹介いただいております。

画像認識・画像処理に活用可能なZMP製品

RoboVision2s
測距や物体検出ソフトに対応した超高感度ステレオカメラシステム

RoboVision3
最大150m、水平100°の距離と視野のセンシングが可能なステレオカメラ







© ZMP INC. All Rights Reserved.