
自動運転はいつから始まった?知られざる開発秘話とは
「前例のない自動運転開発に成功したエンジニア」
①小さなロボットベンチャーが自動運転を始めた理由とは?
Q. ZMPはなぜ自動運転の開発を始めたのでしょうか?
当時の時代の流れから、自動運転に活かすための基礎研究をしたいという研究者の方々からの声が増え、ZMPはこれを支えるツールの開発を始めました。そして、自動運転のセンサーやアルゴリズムを簡単に※評価できるキットとして、2009年にRoboCar 1/10を発売しました。

その後は、せっかくなので人が乗れる車で自動運転を実現しようと考え、一人乗り小型車や乗用車、ミニバン、SUVといった車を自社で自動運転車として開発し、公道での走行を目指していきました。

Q. 自動運転の開発にはどのような技術が必要なのでしょうか?
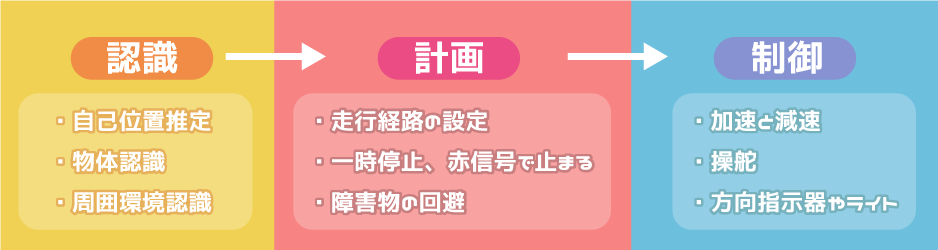
まずは、センサーとマップから自分の位置を理解するための自己位置推定技術。そして、障害物や周囲環境を認識する技術。さらに、位置や周囲を認識した上で、環境の変化を予測して、次の自分の動きを判断する技術が必要になります。
その他にも、計画した通りに車を動かすための制御技術や、センサーをシミュレーションで評価する技術。そして、データのセキュリティや人の安全を管理し、分析する技術も必要になってきています。さらに、膨大なデータを効率的に処理する技術なども求められています。
②二足歩行ロボットと自動運転車、実は似ている?
Q. 二足歩行ロボットと自動運転はかなり違う分野のように感じるのですが、どうして実現することができたのでしょうか?
実は、二足歩行ロボットと自動運転は、技術的にかなり似ています。なので、ZMPとして全く新しいことをしているわけではありませんでした。
例えば、二足歩行で動くために必要なモーター制御や、バランスをとるための加速度センサーによる姿勢推定といった技術を持っていました。
自動運転を開発する際には、モーターで制御するものが、足の形をした機械から丸い車輪になったという違いであり、それまでの技術を応用することで実現することができました。

また、自動運転を開発する車体はラジコンサイズから始まり、その後、人が乗るサイズへとステップアップしていきました。この車体が大きくなる過程で、必要な電圧が大きくなったり、新しいテスト環境や作業用のガレージが必要になるなど、開発に必要な環境は大きく変わりました。一方、センシングや制御に必要な技術は基本的に変わりませんでした。
Q. 自動運転を開発していた当時、どのような困難がありましたか?
当時はZMPとしても、業界としてもほぼ初めての自動運転開発であったため、前例がない課題が多くありました。正解がない中、解決策を手探りで探していき、スケジュール通りに開発することがとても大変でした。
また、今の開発環境と異なり、自動運転のために用意されたセンサーやアルゴリズムを評価する環境がありませんでした。そのため、何が必要なのかもわからず、足りないものは自分たちで作らなければならないという状態での開発は非常に苦労しました。

Q. 現在、ZMPが開発している物流ロボCarriRoシリーズや宅配ロボなどのライフロボットシリーズにも、当時の自動運転技術が受け継がれているのでしょうか?
認識や制御といった基本的な仕組みはCarriRoやライフロボットも同じであるため、共通している技術はかなりあります。特にライフロボットをスタートさせる動作は、自動運転と同じ技術を使っているため、立ち上げが非常にスムーズにできるという特徴があります。このように、新たなロボットや製品を開発する際に、重要になる要素技術をすでに持っていることはZMPの強い武器となります。

③社会にとって新しいものを生み出し続けるZMP
Q. 前例がない中で自動運転を実現することができるZMPとは、一体どんな企業なのでしょうか?
業界にとらわれないものを作り続ける力がある企業です。自動運転は、法律による規制の影響で、まだ公道では走ることができません。一般的な企業では、自動運転のような先の見えない業界へ足を踏み入れる決断をすることは難しいはずです。しかし、ZMPは自動運転の技術を開発しながら、法律も自分たちで変えていこうという選択をしました。このような文化がZMPには根付いており、結果として新しいものを生み出す企業であり続けるのだと思っています。

Q. エンジニアとしてZMPで働く楽しさはどこにありますか?
ZMPは常に社会にとって新しいものを作っています。自分が作った新しいものが社会に受け入れられていく姿を見れることが、エンジニアとして非常に面白いところです。
企業の文化として、実現するかどうかわからないアイデアでもプロジェクトとして立ち上がることがよくあります。当然、実現させることは簡単ではありませんが、この困難を乗り越えて、今までなかった技術を自分で開発することができる環境がZMPにはあります。このような未知へのチャレンジを楽しめるエンジニアにとって、ZMPは非常に面白い舞台になると思います。
まとめ
自動運転を始め、社会にとって新しいものやサービスを実現させ続けてきたZMP。そこには、二足歩行ロボットの開発時から受け継がれてきた技術力と、未知の領域に果敢に挑戦する企業文化があることがわかりました。

↓採用の最新情報はこちらをチェック↓

ニュース・プレスリリース
自動運転・物流を知る|ZMP編集部

物流DX推進ネットワーク
「CarriRo Connecting Partners」とは?
AGV(無人搬送車)とは?
導入前に知っておきたい基礎知識







© ZMP INC. All Rights Reserved.