ステレオカメラRoboVision 2とIZACによるポイントクラウド計測事例紹介
ステレオカメラRoboVision 2とIZACによるポイントクラウド計測事例紹介
-高価なLIDARを用いずカメラで点群生成。自己位置推定やSLAMへの活用に—
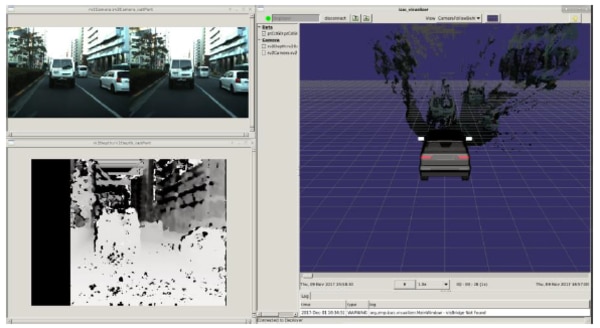
左上:左右カメラ映像、
左下:視差画像(距離を濃淡表示)
右:3次元ポイントクラウド表示
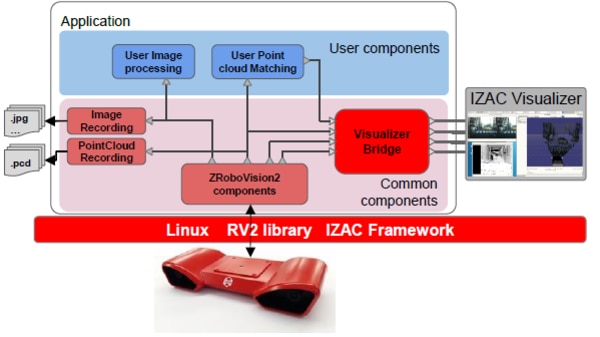
システム構成
株式会社ZMP(東京都文京区、代表取締役社長:谷口恒、以下ZMP)は、この度、ステレオカメラRoboVision 2と自動運転用コンピュータIZACによるポイントクラウド計測事例をウェブサイトに公開いたしました。
本事例では、RoboVision 2のデータから3次元のポイントクラウド(点群)データを生成し、自動運転用コンピュータIZACで処理しています。
ポイントクラウドにより、平面な路面、前方車両、となりのレーンの複数の車両などが確認できます。ポイントクラウドは3次元LIDARからの生成も可能ですが、ステレオカメラからの生成により、より低価格なシステムの構築が可能です。
ポイントクラウドは、自己位置推定や障害物検出、SLAM(Simultaneous Localization And Mapping)など、自動運転や自律移動ロボットのセンシングシステムとしての活用が可能です。
RoboVision 2は、ソニー製超高感度CMOSセンサを搭載したステレオカメラで、自動車や移動ロボットのセンシングシステムとして、自動車メーカ、部品メーカ、研究機関での研究開発で活用されています。
IZACは、自動運転に必要となる認知・判断・操作の機能をライブラリ化し効率的に開発を進めることができるハードウェアとソフトウェアの統合システムで、汎用開発ツールOpenCV・ポイントクラウドライブラリにも対応しています。IZACは、当社開発の自動運転車RoboCar® MiniVanに搭載し自動運転技術開発プラットフォームとして販売するとともに、公道での各種実証実験に使用しております。また、宅配ロボットCarriRo® Deliveryにも搭載し、各種実証実験で使用しております。
当社は、引き続き自動運転技術の開発を進め、関連技術・製品・サービスにより、皆様の研究開発を支援してまいります。
【ステレオカメラRoboVision 2とIZACによるポイントクラウド計測動画】
【ステレオカメラ RoboVision2】
http://www.zmp.co.jp/products/robovision2
【自動運転用コンピュータ IZAC】
http://www.zmp.co.jp/products/izac
プレスリリース記事
プレスリリースPDFはこちらからご確認いただけます。