2020年東京五輪に向けお台場での公道実験の進捗を公開
2020年東京五輪に向けお台場での公道実験の進捗を公開
-右折や路駐車両の回避など、強化した機能の検証を実施-
株式会社ZMP(東京都文京区、代表取締役社長:谷口 恒、以下ZMP)は、2020年東京五輪での完全自動運転タクシーによるサービス提供の実現へ向け、交通量の多い市街地である東京お台場での公道実験を継続実施しております。この度、本年2月の進捗公開に続き、現在時点の技術開発の進捗状況を動画にて公開致しました。実験では、これまで公開してきた自動運転機能へ追加・改善した機能の検証を実施することを目的としております。
今回行った本実験ではドライバーが乗ったレベル3の実験となりますが、警察庁より発表の指針に沿った車内にドライバーのいない自動運転車の公道実験に向けた重要なステップと位置付けており、2018-2019 年には実証エリアを広げ、2020 年にサービスを開始する計画で、今後も技術進捗を随時公開してまいります。
当社は 2014 年より愛知県名古屋市において公道での自動運転の実証実験を開始、2016年2 月には、神奈川県藤沢市湘南ライフタウンにおいて実施された公道での自動運転体験サービス実証実験において自動運転技術を担当、その後、当社オフィスのある文京区で、道路幅も狭く路上駐車や交通量も多い典型的な都市部環境での公道実験を経て、お台場での公道実験を重ねて参りました。
2020年東京オリンピックの開催エリアでもあり交通量も非常に多いお台場の交通環境においてレーンチェンジや交差点右左折などの機能を開発、検証を行って参りましたが、今回は特に以下の改善・追加した機能の検証を目的として公道実験を実施しております。
まず、右折機能の改善として、右折信号の認識向上や交差点内の対向車の予測機能を向上させ、自動運転としては特に難しい交差点での右折精度の向上に関する実証実験を行いました。また都市部には多い路上駐車をしている車両の状況に応じて走行ルートを修正していく路上駐車車両の回避機能の実証実験も行い、さらにレーンチェンジの車両制御のアルゴリズムを改善し、より人間の運転に近づいた自動運転も検証いたしました。この実証実験により、当社開発の自動運転機能の向上が確認されております。
なお、これらの自動運転は、ZMPが開発した自動運転開発プラットフォームの製品であるRoboCar MiniVan、およびIZACによって実現されております。
当社は、今後もさらなる安全性の向上を目指して実証実験を継続する計画であり、引き続き技術進捗を随時公開してまいります。

写真 : 右折矢印信号の認識
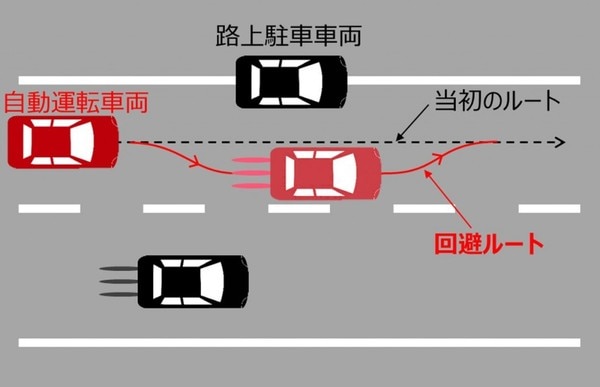
写真 : 路上駐車車両の回避イメージ
【実証実験走行動画】
【動画サイト】
今回実験の様子
http://go.zmp.co.jp/pressrelease_20170427
本年2月の進捗公開
http://www.zmp.co.jp/news/news_20170221
【関連製品情報】
RoboCar MiniVan 1800 万円~
自動運転やADAS開発向け車両システムで、プログラムによる車両制御が可能なプラットフォーム
http://www.zmp.co.jp/products/robocar-minivan
IZAC
自動運転の技術要素をIntel社製CPUのコンピュータ上でライブラリ化した自動運転に必要なハードウェア/ソフトウェアの統合パッケージシステム。ZMPの実施する公道実験を踏まえて機能拡張をしています。
http://www.zmp.co.jp/products/izac
【展示会情報】
自動車技術展 人とくるまのテクノロジー展 2017 横浜
会期:2017年5月24日(水)~26日(金) 会場:パシフィコ横浜・展示ホール
ブース番号:102
展示会用ホームページ:http://www.zmp.co.jp/products/2017hitokuru
【プレスリリース記事】