自動運転開発プラットフォーム RoboCar® 1/10 最新モデルを販売開始
-従来品よりも小型で簡易に充電可能なリチウムイオンバッテリーを標準搭載!-
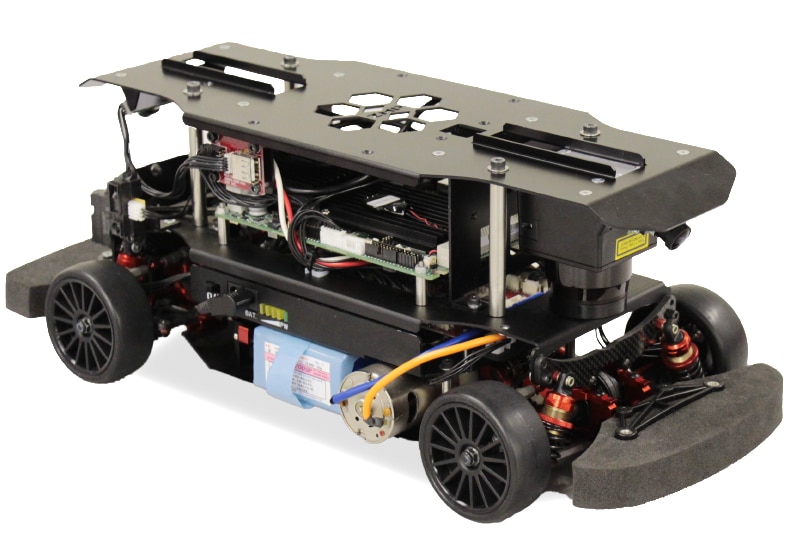
RoboCar® 1/10最新モデル

リチウムイオンバッテリー接続イメージ
株式会社ZMP(東京都文京区、代表取締役社長:谷口恒、以下ZMP)は実車1/10スケールの自動運転技術開発プラットフォームRoboCar® 1/10の最新モデルの販売を開始します。
本製品は2009年の発売以来、自動車/部品メーカ、大学等研究教育機関でご好評いただいており、自動運転や遠隔操作による運転支援システムの研究・開発など様々な用途でご利用いただいておりました。この度は、従来モデルよりシャシー及び制御部用バッテリーを新たなものに変更した最新モデルを販売いたします。本体価格は一般:82.5万円/アカデミック:70.5万円で本日より受注を開始し、2019年12月に出荷予定です。
【従来・最新モデルの変更点】
1. 車体シャシーの変更 ※車体の大きさ、性能等に変更無し
・従来モデル :カーボンFRPシャシー
・最新モデル :アルミシャシー
2. 制御部用バッテリーをオプションから標準搭載に変更
・従来モデル :単三ニッケル水素電池(×12)をオプション販売
・最新モデル :リチウムイオンバッテリーを標準
今回の制御用バッテリーの変更により、従来品と比べて簡易的に充電が可能となっているため、本製品を利用した研究・開発の手間が軽減されることが期待できます。
【自動運転技術開発プラットフォームRoboCar® 1/10 製品紹介ページ】
https://www.zmp.co.jp/products/robocar-110
【価格】※全て税抜価格
[本体]
・RoboCar® 1/10 一般 82.5万円/ アカデミック 70.5万円
・RoboCar® 1/10 前後レーザレンジセンサセット 一般 106.5万円/ アカデミック 94.5万円
[オプション]
・遠隔操作パッケージ 1カメラタイプ 一般 135.5万円/ アカデミック 123.5万円
・遠隔操作パッケージ 2カメラタイプ 一般 140.5万円/ アカデミック 128.5万円
・MATLAB コネクション 本体+ソフト 一般 126.5万円/ アカデミック 114.5万円・MATLAB コネクション ソフト単体 一般・アカデミック 20万円
【RoboCar®1/10の主な仕様】
分類 | 項目 | 仕様 |
本体 | サイズ・重量 | 190×429×150[mm]、2.2[kg](バッテリ、オプションを除く) |
最大積載重量 | 約1.0[kg] | |
最小回転半径 | 約500[mm] | |
最高速度 | 約10[km/h] | |
シャシー・フレーム | アルミシャシー、ダブルウィッシュボーンサスペンション、ZMP製アルミフレーム | |
モータ | 駆動用:小型DCモータ/ステアリング用:ロボット用サーボモータ | |
バッテリ | 制御部用バッテリ:専用Li-ionバッテリーパック(×1) 駆動部用バッテリ:ニッケル水素バッテリパック(7.2[V]、×1) | |
外界センサ | 単眼USBカメラ×1:640×480[pix]、30[fps]、128[deg] 赤外線測距センサ×8:検知距離100~800[mm] レーザレンジセンサ(オプション、前後2ヵ所搭載可) :HOKUYO URG-04LX-UG01 検知距離60~4000[mm]、-120~120[deg] | |
内界センサ | ジャイロ(1軸)、加速度(3軸)、ロータリエンコーダ(車輪×4、モータ×1、ステアリング×1) | |
CPU | Intel Celeron Quad Core 1.83[GHz] | |
WiFi | IEEE802.11b/g/n/ac WEP/WPA | |
本体側ソフトウェア | OS | Linux (Ubuntu 14.04+リアルタイムパッチ) |
サンプルプログラム | 開発言語:C++/機能:車両制御、センサ情報取得、LAN通信、LRFによる障害物回避、データ保存、遠隔操作インタフェース | |
PC側ソフトウェア | 動作環境 | Windows 7/8/8.1/10(開発環境:Visual Studio 2010以降C#、Express可) |
【プレスリリース記事】
プレスリリースPDFはこちらからご確認いただけます。