

360°全周囲画像計測 Surround RoboVision(サラウンドロボビジョン)
ZMPは、自動運転向けの周辺モニタリングセンサとして、360°全周囲を高感度に撮影可能なSurround RoboVisionを提供します。

図 Surround RoboVisionでの計測イメージ
Surround RoboVision(サラウンドロボビジョン)について
「Surround RoboVision」は、4眼のステレオカメラ1つと2眼のステレオカメラ3つから構成されます。本製品を活用して、5つのステレオカメラで時間同期したイメージを最大30fpsで取得が可能になります。これにより、計測したステレオカメラ画像から視差を使った周辺物体の距離計測や物体の検出アルゴリズム開発にも適用いただける製品となっております。従来、複数のカメラを用いて計測する際にはカメラの同期を調整する必要がありましたが、本製品を活用することにより、複数のカメラを同期して計測することが可能です。
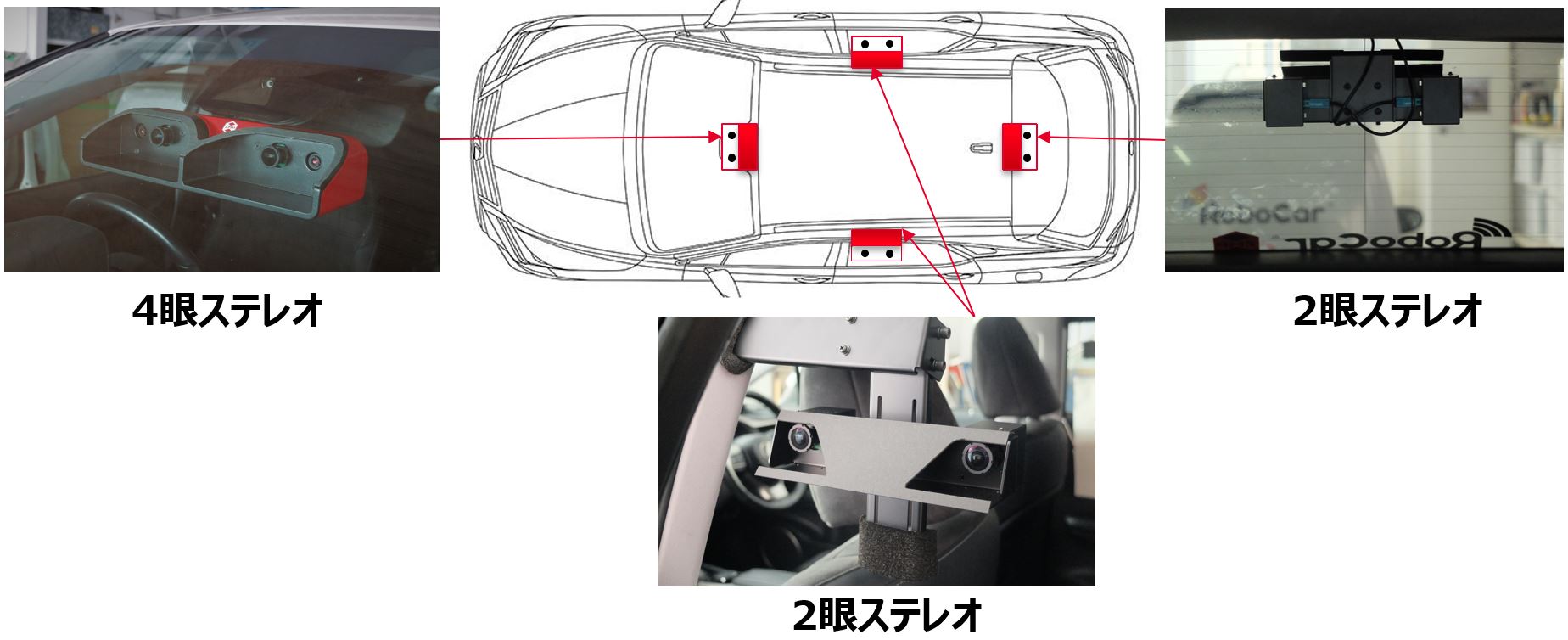
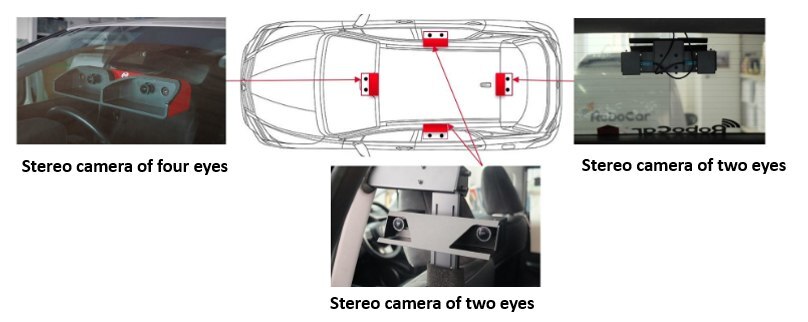
図 Surround RoboVision センサ構成
RoboVision3は、イメージセンサとして、最新のソニー製車載向け高感度CMOSイメージセンサIMX390*を採用、24bitのRAWデータ出力により、画像の後処理が柔軟に行え、従来認識が難しかった対象をとらえることが可能となります。
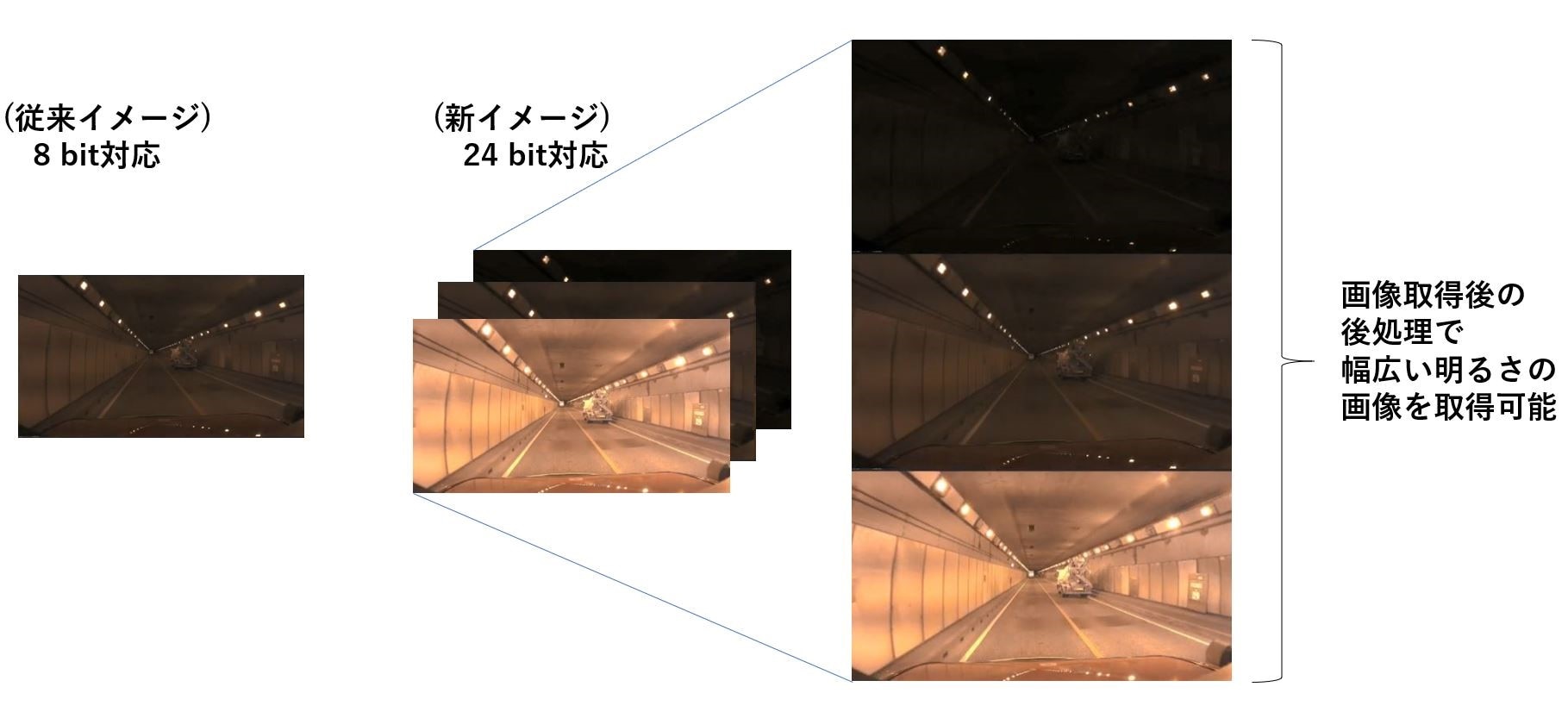
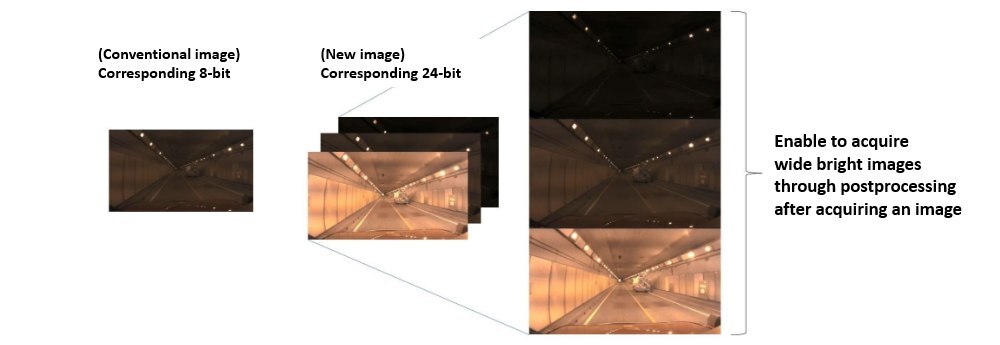
図 24bit対応出力画像の画像処理イメージ

図 明るさのレンジを変更した画像(トンネル入り口付近)
また、付属のソフトウェアにより、各カメラの計測画像のPCへの同期保存や、距離計測結果を出力するソフトウェアを付属し計測結果を活用できる環境を提供予定です。
オプション
車両に搭載するカメラの取り付け用冶具や計測用PC、またカメラカバーなどのサラウンドビューカメラに付随する製品もご要望に応じて対応可能です。
計測イメージ
計測した画像に距離画像を重層したイメージ動画となります。
価格
360°全周囲モニタリングシステム Surround RoboVision 462万円(税別)~
<構成>
4眼ステレオカメラユニット×1,2眼ステレオカメラユニット×3,フロントガラス映り込み防止プレート×1,フレームグラバユニット×3, 接続ケーブル×3, ソフトウェア開発環境(SDK)CD-ROM×1
<構成>
4眼ステレオカメラユニット×1,2眼ステレオカメラユニット×3,フロントガラス映り込み防止プレート×1,フレームグラバユニット×3, 接続ケーブル×3, ソフトウェア開発環境(SDK)CD-ROM×1
製品のお問い合わせ・情報はこちら







© ZMP INC. All Rights Reserved.