
自動運転の技術と仕組みがわかる!ラクロに学ぶ実用化への道
「自動運転は『実用化』されている?」

①「一人乗り」「歩行速」にはワケがあった!
ZMPが手がける「RakuRo」は、目的地まで自動で歩行速移動する一人乗りのパーソナルモビリティです。なぜ歩行速なのか。なぜ一人乗りなのか。気になるRakuRoの開発秘話を聞いてみました。

編集部:
RakuRoはどのようにして生まれたのでしょうか?
Sさん:
ZMPは家庭用二足歩行ロボットに始まり、2008年からは自動運転の開発に力を注いできました。その後、世界初の自動運転タクシーの実証実験を成功させ、日本の自動運転における先駆者となりました。一方、法律の規制により、レベル4以上の一般公道での自動走行は認められていません。そこで、自動運転をいち早く実用化するために生まれたのが「RakuRo」です。
↓ RakuRoの動画 ↓
Sさん:
「RakuRo」を見ると、「なぜ一人乗り?」「もっと速く走れないの?」と思いますよね(笑)。実は、「RakuRo」は長さ120cm 幅70cm 高さ109cm、時速6kmという規格の電動車いすとして分類されます。そのため、自動運転で公道を走行することができるのです。ZMPでは、この「RakuRo」を使った世界初の自動運転ロボシェアリングサービスを東京の佃・月島エリアで2020年10月より開始し、多くの方々にご利用頂いています。つまり、移動手段としての自動運転を「実用化」していることが「RakuRo」の強みとなります!
②自動運転は準備が肝心!
編集部:
自動運転ロボットは目的地を決めたらすぐ動くイメージがあるのですが、実際どのような過程があるのでしょうか?
Sさん:
自動運転は準備が肝心になります。人が目的地に行くためには、まず自分がどこにいるのかを理解することから始まりますよね。ロボットでもそれは同じです。しかし、土地勘や常識を持っていないロボットは、正確に位置を知るための準備を入念に行う必要があります。

Sさん:
まずは、3Dのマップをとり、現実そっくりの仮想世界を作成します。従来は時間のかかったこのマップ作成作業は、自社開発のロボマップにより、短期間で作成することができます。次に、3Dマップを走行用の地図データに変換し、ロボットが走行可能なエリアと、目的地に向かうための道を設定します。
Sさん:
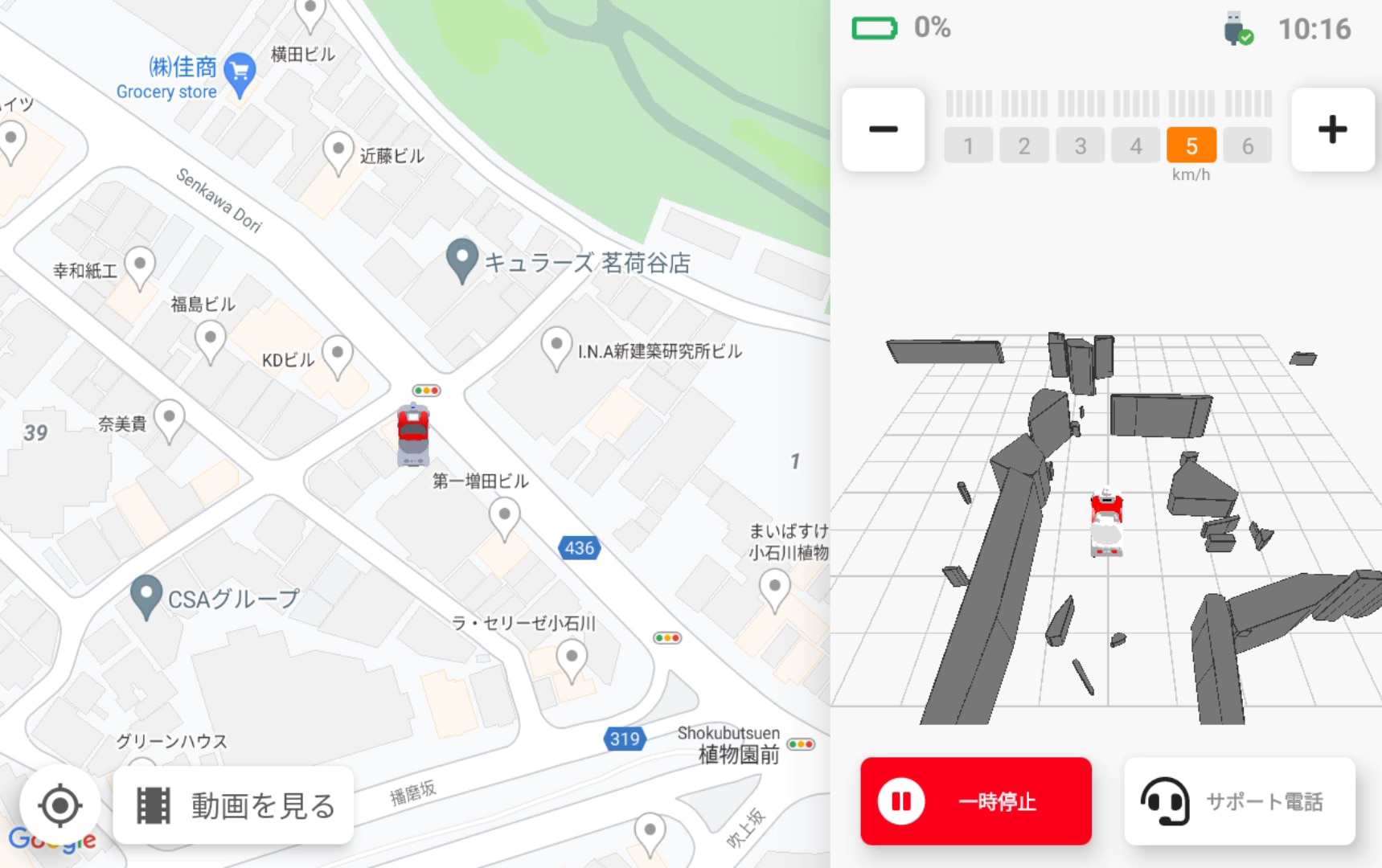
そして、実際に走る際は、ロボットに搭載されたセンサーから周囲の情報を取得し、事前に作成したマップと照合させることで自分の位置を把握します。また、高精度のGPSを使って自分の位置を知ることもあります。その後、実際にロボットを走行させ、より自然な走行ルートに調整していくことで、最終的にルートが決まります。こうして、ようやく設定したルートに沿って走行を始めることができます。

③たくさんのセンサーを持つ自動運転ロボット
編集部:
走行中の障害物や信号はどのように判断しているのでしょうか?
Sさん:
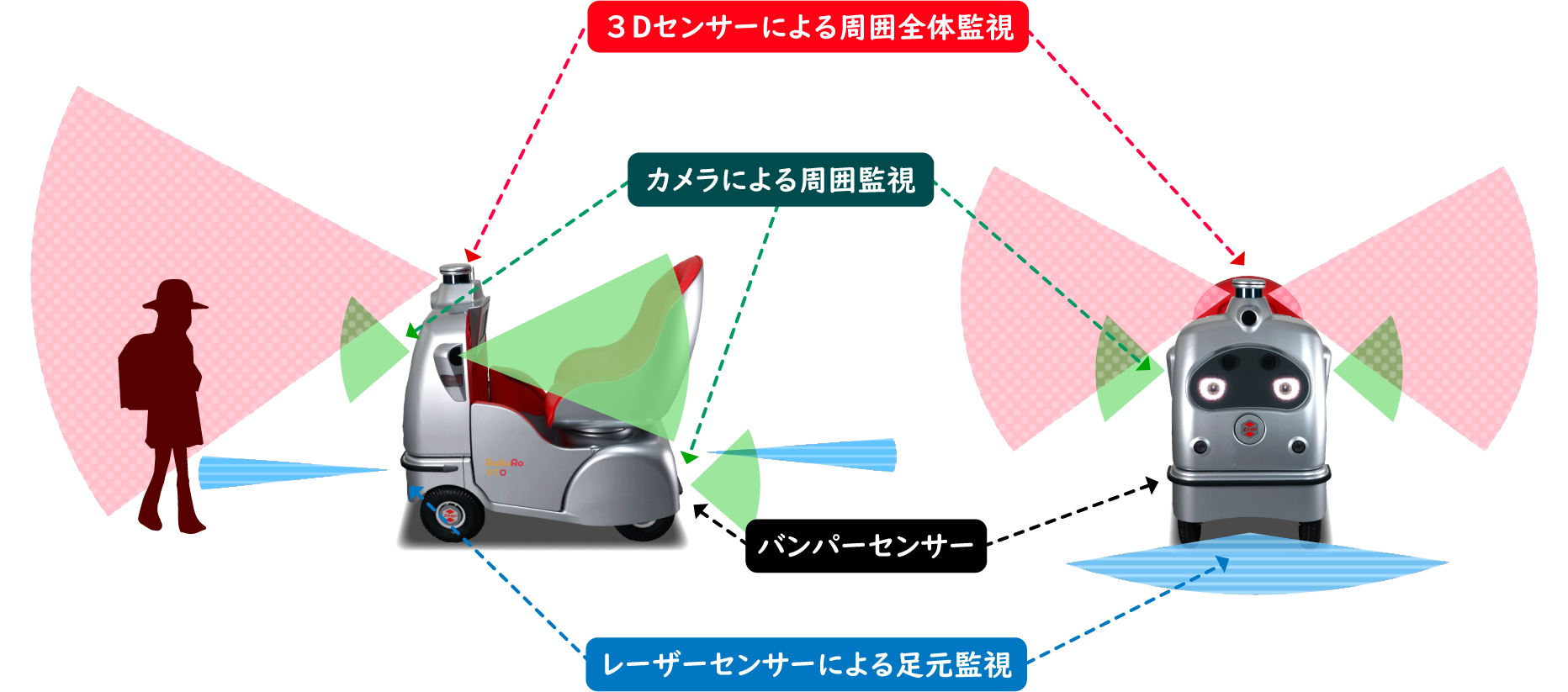
自動運転では安全な走行のために、多くのカメラやセンサーを使います。そして、こんなにかわいい「RakuRo」の小さな機体には、いくつものセンサーやカメラがついており、これらが走行中の止まる・避ける等の判断を行っています。
Sさん:
まず、一番上についているものが「3D-LiDAR」です。これにより、周囲に光を飛ばし、跳ね返る時間から距離を計測することで、建物や通行人のような障害物の形状と動きを把握することができます。これは、自分の位置を知るためにも使われ、現状の自動運転において要となるセンサーです。そして、前後にあるものが「2D-LiDAR」です。これは、3D-LiDARと原理は同じですが、3D-LiDARの苦手な近距離の障害物を検知するために使われています。
Sさん:
そして、前後左右にはカメラが合計6台搭載されています。前方の高精度カメラでは、画像認識技術によって信号の認識や顔認証をすることが可能であり、実社会で走行するために重要な役割を持っています。一筋に信号認識と言っても、環境や天候の違いによって多種多様なデータと学習が必要であり、精度向上のため日々進化している技術でもあります。また、周囲のカメラは安全に走行するための遠隔監視等に活用されています。
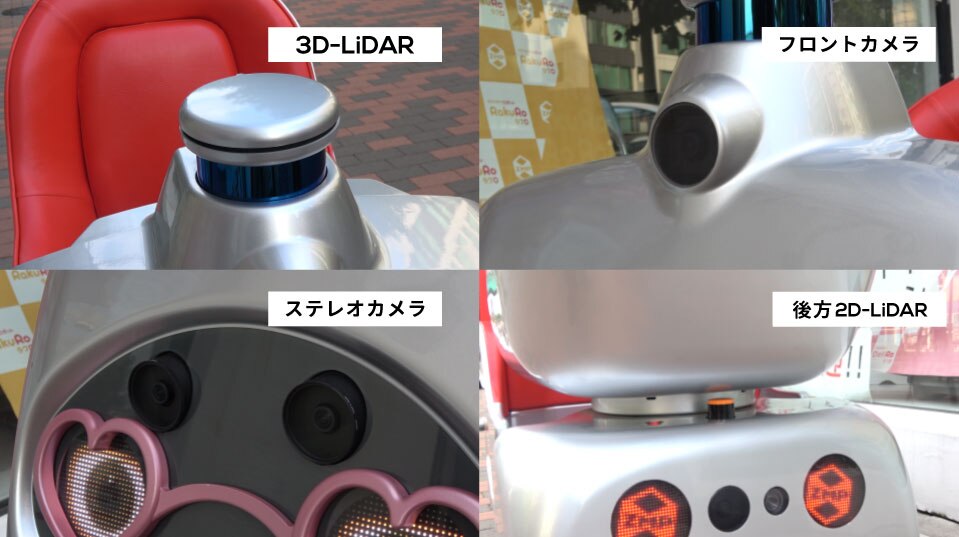
Sさん:
そして、万が一人やものと接触した際に瞬時に止まるため、バンパーセンサーが前後に取り付けられています。このように様々なセンサーとカメラが補いあうことによって、正確に周囲の状況を判断し、避ける・止まるという操作を行っていくことで、安全な自動運転を実現しています。
まとめ
今回は意外と知らない「自動運転の仕組み」を、既にサービス化している歩行速モビリティ「RakuRo」を題材に聞いてみました。
ちょっとでも自動運転を身近に感じたら、ぜひ「RakuRo」に乗りに来てください!
ニュース・プレスリリース
関連動画
自動運転・物流を知る|ZMP編集部
ロボット社会の頭脳?
「ROBO-HI」
倉庫・工場で自動運転?
物流支援ロボット「CarriRo」の仕組みに迫る
自動運転の技術と仕組みがわかる!
ラクロに学ぶ実用化への道
RakuRo Official Twitter







© ZMP INC. All Rights Reserved.