
ロボット社会の頭脳?クラウド型マルチロボOS 「ROBO-HI」
「ロボットがエレベーターを使う…?」
①ROBO-HIはなくてはならない「頭脳」だった!
編集部:
ROBO-HIとはどのようなサービスなのでしょうか?
Kさん:
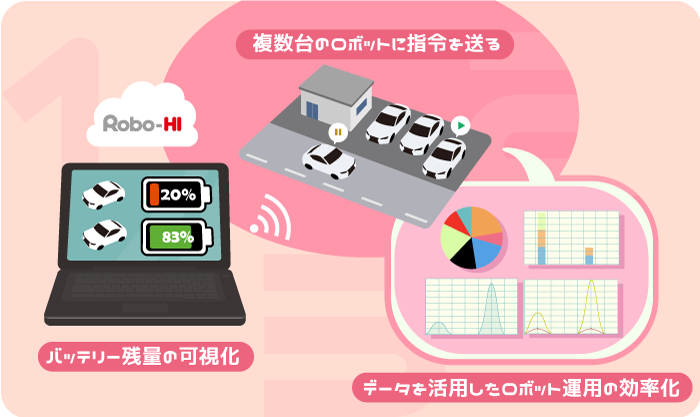
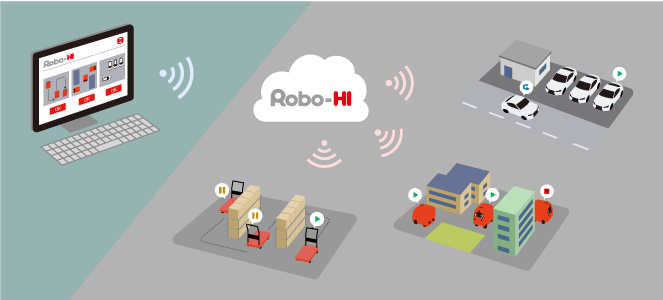
施設や街単位でロボットを統合的に管理するクラウドシステムです。ROBO-HIの機能としてはまず、ロボットの仕事や位置、バッテリー残量を可視化することができます。そして、ロボットとロボットがぶつかったり、動けなくなってしまうことを避けるために、複数台のロボットに指令を送るロボット社会の「頭脳」としての役割もあります。さらには、蓄積されたデータを活用したロボット運用の効率化も実現することができます。
編集部:
ROBO-HIはどのような場面で役に立つのでしょうか?
Kさん:
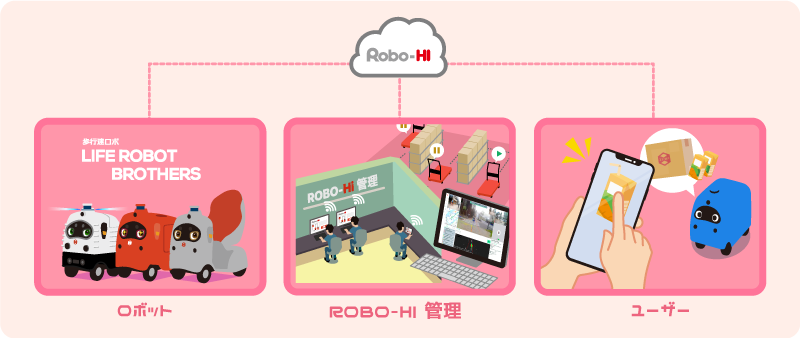
ショッピングセンターのフードコートを想像してください。そこにはデリバリーロボットが走行しており、お客様の注文に応じて料理を配膳します。店舗ごとにロボットを管理していては、ロボット同士がぶつかったり、お互い狭い通路に入り止まってしまうかもしれません。そこでROBO-HIが複数のロボットをまとめて管理し、円滑に配膳するための交通整理を行います。
Kさん:
また、すべてのロボットを管理するには各店舗の注文を把握する必要があります。全店舗の注文データをROBO-HIに統合することによって、状況に合わせて稼働できるロボットに指示を与え、効率よく配膳をすることができるようになります。
このようにロボット同士の交通整理をする信号としての役割だけでなく、他の機器やサービスとロボットの間に入り、ロボット社会の「頭脳」としての役割も果たすのがROBO-HIです。
編集部:
なぜZMPがロボット管理プラットフォームを開発するのでしょうか?
Kさん:
ZMPの強みは、独自のロボットを複数開発し、既に様々なロボットを管理する技術があることにあります。ZMPの中だけでもパーソナルモビリティ・警備・宅配・搬送と独自のロボットを開発しており、他社のロボットとの連携も目指しています。このように自社で複数のロボットを持つZMPが管理プラットフォームを開発することで、実用的で精度の高いシステムを提供することができます。

②ロボットがエレベーターに自動で乗る時代に
編集部:
ビルの中でROBO-HIはどのように活躍するのでしょうか?
Kさん:
例えば、ビルの中でロボットは1階から2階へ上がりたいと思っても、エレベーターのボタンを押すことが出来ません。ロボットにボタンを押すための腕と指を作るのではなく、エレベーターとロボットをつなぐ司令塔としてのROBO-HIが指示を出すことによって、ロボットが自分でエレベーターを呼び出す仕組みを作ることができます。
編集部:
ROBO-HIはどのようにエレベーターと連携しているのでしょうか?
Kさん:
エレベーター会社が他のソフトウェアをつなげる窓口であるAPIを持っている場合は、そちらを使ってROBO-HIと連携していきます。そして、窓口を持っていない場合も、PLCと呼ばれる外付けの制御装置を使用することによって、ROBO-HIから遠隔操作することが可能になります。この接続方法はセキュリティドアなどの他の機器でも同様です。


◆API(Application Programming Interface)
APIとは、ソフトウェアやアプロケーションの一部機能を外部に公開することにより、第三者が簡単にその機能を使うことができる窓口のようなものです。自分で1から作ることなく既存のプログラムを活用できるため、開発の効率化を実現することができます。
◆PLC(Programmable Logic Controller)
PLCとは、ハードウェアで行っていた制御をソフトウェアでも行えるようにするためのコントローラです。この制御とは、機械を目的の通りに動くようにするための技術です。従来のリレーシーケンス制御では物理的な電気信号で制御するのに対し、PLCを取り付けた場合はプログラムにより制御できるという違いがあります。
編集部:
ビルにROBO-HIがないとどのような問題が起きてしまうのでしょうか?
Kさん:
ビル内に様々な種類のロボットが別々に管理されているとします。多くのロボットが一斉にエレベーターを使うために集まると、エレベーターの周囲はロボットまみれになってしまいます。そこで、ROBO-HIが全てのロボットとエレベーターを管理する司令塔となることで、ロボットたちをきれいに整列させることができます。これはあくまで一例であり、他にもロボットの行動管理や他の機器との連携が行われないとロボットがうまく機能しない場面はあります。
③ROBO-HIのデータ活用と未来とは?
編集部:
ROBO-HIのデータ活用についてもう少し教えてください。
Kさん:
ROBO-HIにロボットや周辺機器が繋がり、たくさんの情報がやり取りされるため、膨大なデータが溜まっていきます。このデータを分析・活用できることもROBO-HIの特徴です。
例えばビルで複数台のロボットが走行している場合を考えてください。運用している中で、1階から2階に上がる間でかなり多くの待ち時間があるというデータがあったとします。このデータをもとにロボットが混雑しないルートを作り直すなど、効率的な運用に活用することができます。

編集部:
人とロボットが共存する社会で今後ROBO-HIはどのように使われていくのでしょうか?
Kさん:
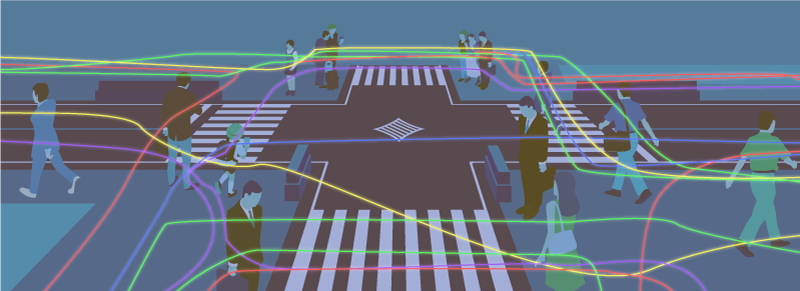
まず、人流データと連携することが考えられます。現在の自律走行ロボットは人が存在しない完全な状態を想定してルートを生成します。しかし、現実には多くの人が行き交い、効率的な走行ができるとは限りません。そこで人流データを統合することで、最短ルートだが人混みが生まれやすい場所を避けたルートを作ることが可能になります。
Kさん:
また、外部サービスと連携することも考えられます。例えば、地震速報と連携することによって地震が起きたときにロボットを一斉に緊急停止することが可能になります。このような連携システムを各ロボットごとに開発していては膨大なコストがかかり、費用や開発スピードの面でもROBO-HIが一括管理するメリットがあります。

まとめ
クラウド型マルチロボOS 「ROBO-HI」は、ロボットの行動を可視化するだけでなく、ロボット同士の交通整理や外部機器との連携、そしてデータ活用までできるZMPの技術が詰まったサービスです。
近い将来訪れるロボットを社会インフラにするためになくてはならないサービスだということがわかりました。
詳しい導入方法やお見積りはお気軽にお問い合わせください!
自動運転・物流を知る|ZMP編集部
ロボット社会の頭脳?
「ROBO-HI」
倉庫・工場で自動運転?
物流支援ロボット「CarriRo」の仕組みに迫る
自動運転の技術と仕組みがわかる!
ラクロに学ぶ実用化への道







© ZMP INC. All Rights Reserved.